1. 引言
在人工智能快速发展的今天,我们正站在一个历史性的转折点上。从对话式AI到执行式AI的跨越,标志着智能体(Agent)时代的到来。OpenClaw作为这一领域的领军者,凭借其卓越的Planning(规划)能力,正在重新定义人机协作的未来。本文将深入剖析OpenClaw的Planning能力,探讨其为何成为智能体核心竞争力的关键所在。

2. OpenClaw Planning能力的技术架构
2.1 三层解耦架构设计
OpenClaw采用了创新的三层解耦架构(渠道层-网关层-大模型/执行层),这种设计为Planning能力提供了坚实的基础:

- 渠道层:负责多平台消息接入和格式统一,为Planning提供丰富的输入来源
- 网关层:作为中枢,负责任务调度和模型路由,是Planning能力的核心执行层
- 大模型/执行层:提供底层推理能力,支持复杂的Planning决策过程
2.2 多Agent协同Planning机制
OpenClaw摒弃了传统的单一"全能Bot"模式,转而采用多Agent协同架构,这是其Planning能力的重要创新:
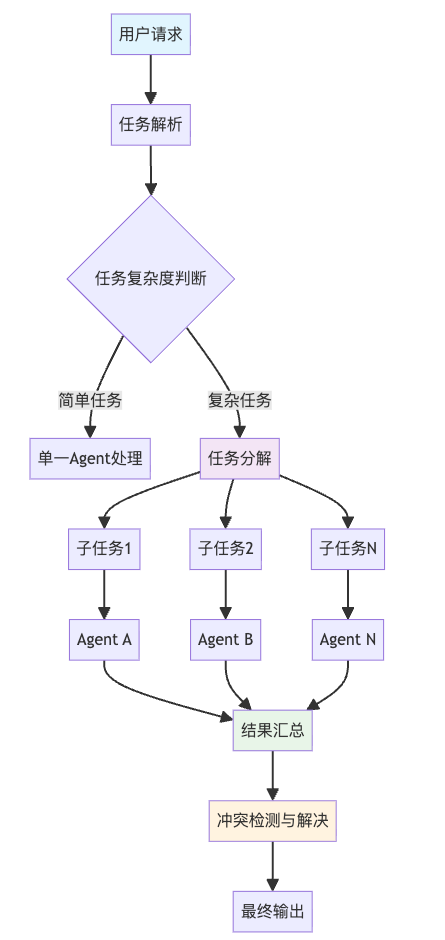
- 任务分解:复杂任务被智能分解为多个子任务,分配给专门的Agent处理
- 并行执行:多个Agent可以并行工作,提高整体执行效率
- 动态协调:系统根据任务进展动态调整Agent的工作分配
- 冲突解决:内置冲突检测和解决机制,确保多Agent协作的和谐性
2.3 递归式技能进化机制
OpenClaw的Planning能力不仅体现在任务执行上,更体现在其自我进化能力:
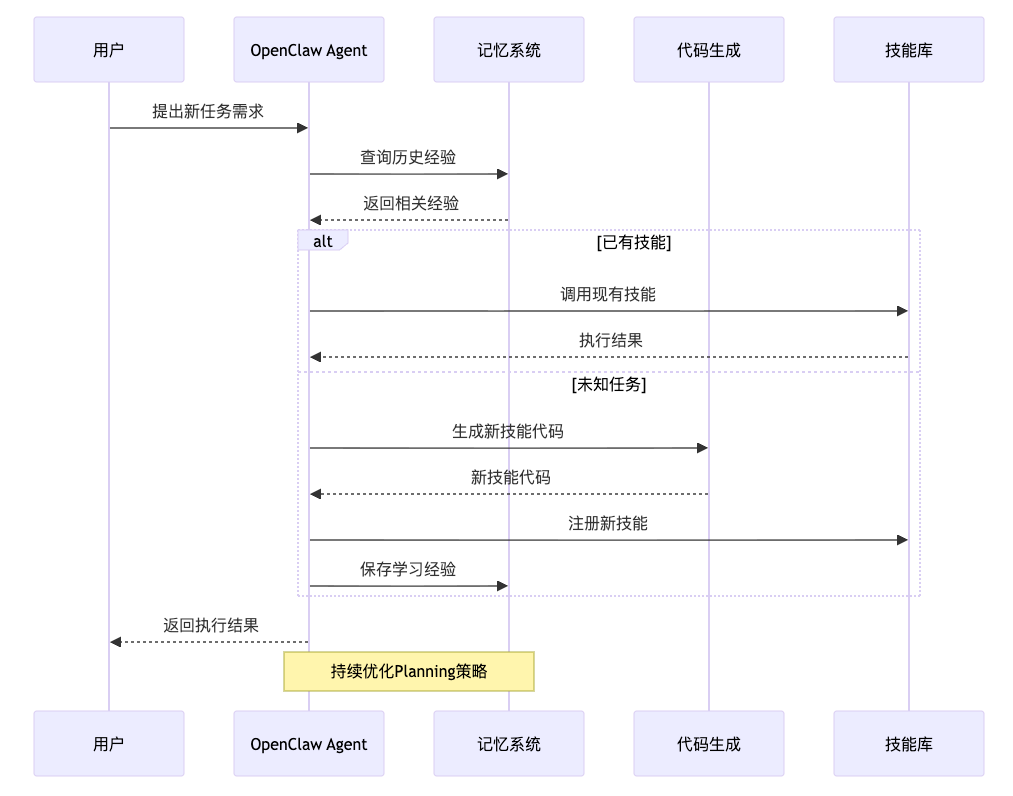
- 技能学习:遇到未知任务时,Agent能够自主编写代码学习新技能
- 经验积累:通过Memory模块持续积累执行经验,优化未来Planning
- 自适应调整:根据执行结果反馈,动态调整Planning策略
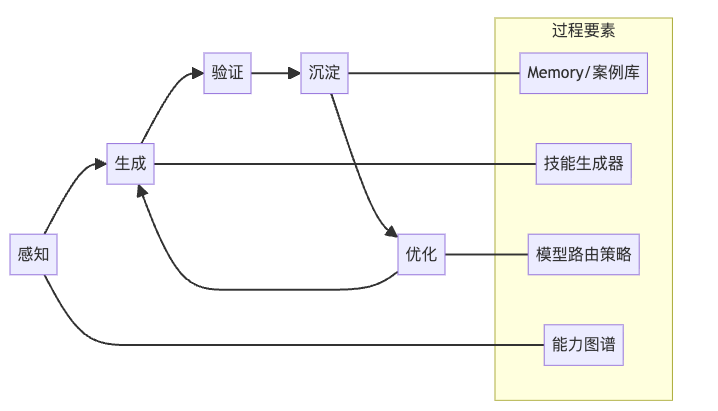
2.3.1 自我进化过程分阶段解析
OpenClaw的Planning自我进化遵循“感知—生成—验证—沉淀—优化”的闭环过程:
- 感知阶段:从渠道层采集用户意图、上下文状态、系统约束(权限、时间、资源)。
- 生成阶段:由Planning引擎基于当前能力图谱(Capabilities Graph)进行任务分解(HTN/GOAP),并在技能库中检索匹配技能;若缺失则触发“技能生成器”自动产出新技能代码。
- 验证阶段:对新规划与新技能进行安全沙箱干跑(dry-run)、资源占用评估、回滚策略预演。
- 沉淀阶段:将规划过程、执行日志、异常与修复方案写入Memory(长期记忆与案例库),形成可复用的“经验片段”。
- 优化阶段:基于指标(成功率、耗时、Token成本、错误率)进行策略调整与技能重构,更新模型路由与工具选择偏好。
关键技术要点:
- 任务分解:采用分层任务网络(HTN)或目标导向行动规划(GOAP),将目标拆解为可执行原子步骤。
- 能力图谱:以技能能力、前置条件、效果、成本为属性,支持图检索与行为空间搜索。
- 度量与回溯:以指标驱动的强化迭代,失败路径被结构化记录以供后续规避与学习。
2.3.2 自我进化的质量保障与安全护栏
- 最小权限与沙箱:所有新技能默认在最小权限与隔离沙箱运行,通过白名单提升权限。
- 审计可追溯:规划与执行链路写入审计日志,支持差异回放与因果分析。
- 策略门控:对高风险操作(外部网络、系统修改)设置策略门与人工确认阈值。
- 回滚与补偿:为破坏性步骤设计回滚点与补偿事务,确保规划具备可恢复性。
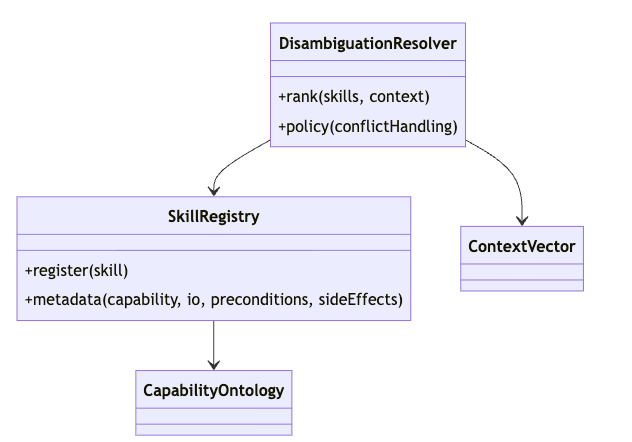
2.4 技能重叠能力的区分与治理机制
当多个技能在能力上发生重叠(如“读取文件”与“解析配置”均可满足部分场景),OpenClaw通过“技能辨析器”进行选择与治理:
- 能力本体(Capability Ontology):以领域、输入输出类型、前置条件、副作用等描述技能。
- 语境匹配(Context Matching):基于当前任务上下文与约束计算技能匹配分。
- 排序与策略(Ranking & Policy):按安全性、成本、精确度、可解释性加权排序,配置冲突策略(互斥/优先/并用)。
- 结果校验(Post Validation):执行后进行结果一致性与副作用检查,必要时自动切换候选技能重试。
工程实现建议:
- 在技能元数据中显式声明“副作用等级”“资源消耗”“安全标签”,用于快速筛选。
- 对常见重叠场景配置静态优先级与动态学习权重(基于历史成功率与成本)。
- 引入A/B路由与影子执行(shadow run)用于评估新技能的真实表现。
3. Planning能力的核心优势
3.1 从被动响应到主动规划
传统AI系统往往只能被动响应用户指令,而OpenClaw的Planning能力实现了质的飞跃:
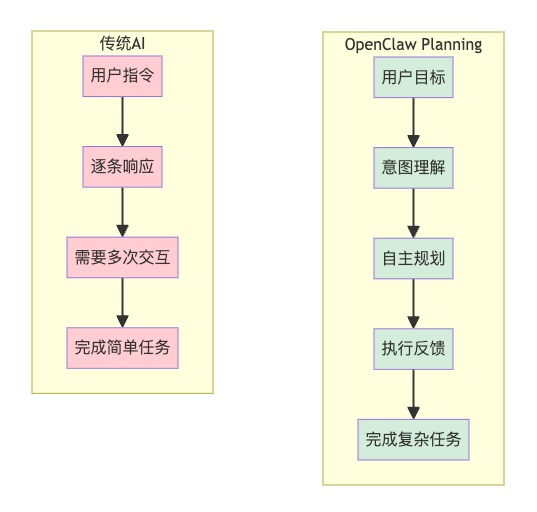
- 意图理解:深度理解用户真实意图,不仅限于表面指令
- 自主拆解:将模糊的目标自动拆解为可执行的具体步骤
- 预判执行:提前规划执行路径,减少执行过程中的不确定性
3.2 跨工具跨平台的统筹能力
OpenClaw的Planning能力体现在其强大的跨平台协调能力:
- 工具整合:无缝整合50+ IM平台和各类系统工具
- 数据流转:在不同系统间智能调度数据流转
- 流程编排:将分散的工具组合成完整的业务流程
3.3 长期记忆与上下文保持
Planning的有效性很大程度上依赖于对历史信息的利用:
- 持久化记忆:通过Memory模块实现跨会话的记忆保持
- 上下文理解:在Planning过程中充分考虑历史交互上下文
- 个性化适应:根据用户习惯和偏好调整Planning策略
4. Planning能力在实际应用中的表现
4.1 办公自动化场景
在企业办公环境中,OpenClaw的Planning能力展现出巨大价值:
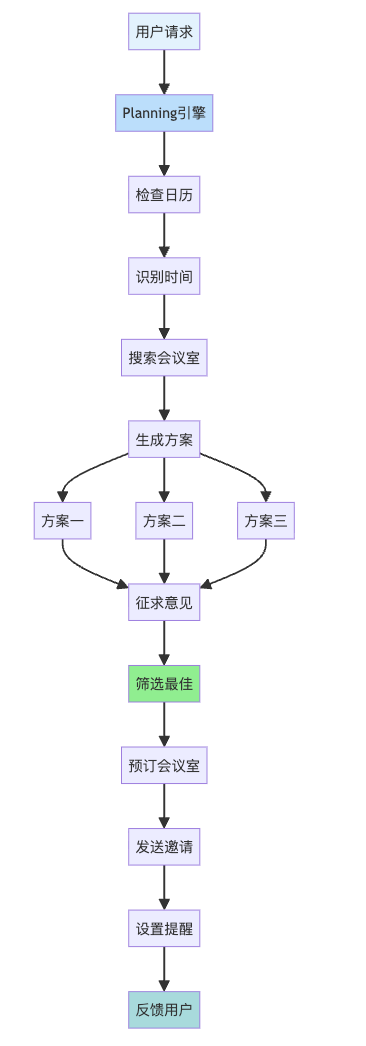
- 会议安排:自动协调多方时间,预订会议室,发送邀请
- 报告生成:从多个数据源收集信息,自动生成综合分析报告
- 流程优化:分析现有工作流程,提出优化建议并实施改进
4.1.1 任务Planning标准流程(面向通用场景)
- 目标获取:解析用户目标、成功准则、期限约束。
- 约束采集:权限、资源、合规边界、外部依赖。
- 状态读取:读取日历/文件/系统状态,构建当前世界模型。
- 任务分解:HTN/GOAP拆解为可执行步骤与依赖关系。
- 工具选择:按能力本体与策略选择最优技能组合与模型路由。
- 计划合成:编排并行与顺序、设置检查点与回滚点。
- 干跑与校验:在沙箱进行干跑,验证副作用与资源占用。
- 执行与监控:带遥测与异常捕获执行,必要时动态重规划。
- 复盘与沉淀:写入Memory,更新策略权重与技能评估。

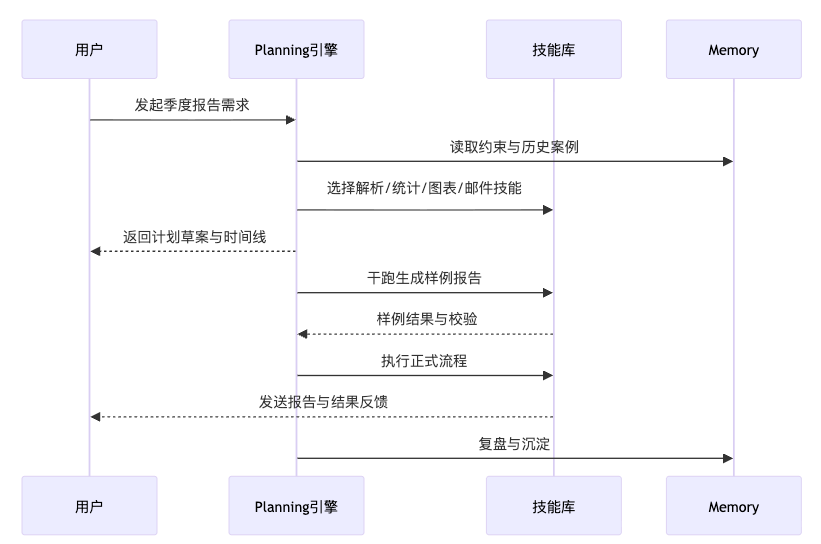
4.1.2 实例:跨部门季度报告自动化
目标:汇总销售、运营、财务三个部门的季度数据,生成可视化报告并邮件发送。
- 输入约束:截止日期本周五;仅可访问本地共享盘与企业BI接口;禁止外发敏感原始数据。
- 规划步骤:
- 目标与约束解析,设定成功准则(报告完整性、可视化质量、发送成功)。
- 状态读取:扫描共享盘目录、拉取BI接口摘要、检查权限。
- 分解子任务:数据抽取→清洗对齐→统计汇总→图表生成→报告编排→合规脱敏→邮件分发。
- 工具选择:选择“Excel/CSV解析技能”“BI拉取技能”“Chart生成技能”“邮件发送技能”“脱敏策略”。
- 计划合成:并行处理三部门数据;在“统计汇总”设置检查点;为“邮件发送”设置回滚(草稿箱)。
- 干跑校验:在沙箱生成样例报告,检测字段缺失与权限问题。
- 执行监控:异常时触发重规划(切换至备用数据源或降级可视化)。
- 复盘沉淀:写入案例库,记录各数据源延迟、失败原因与修复策略。
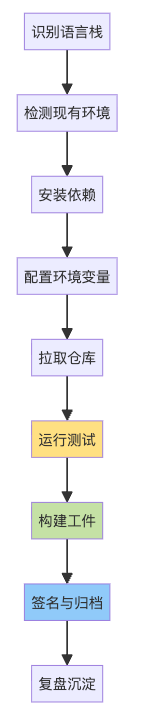
4.1.3 实例:研发环境自动化搭建与测试发布
目标:在新开发者入项时,自动搭建本地开发环境,运行测试并生成构建工件。
- 输入约束:操作系统macOS/Windows均可;只允许在用户Home目录与项目根目录内操作;禁止直接修改系统注册表与敏感配置。
- 规划步骤:
- 目标与约束解析:识别语言栈(Node.js/Go/Python等),确定需要的工具版本与包管理器。
- 状态读取:检测现有环境版本、网络代理、缓存目录与权限。
- 分解子任务:安装依赖→配置环境变量→拉取私有仓库→运行单测→生成构建工件→产物签名→归档。
- 工具选择:选择“包管理安装技能”“env变量写入技能”“git认证拉取技能”“测试执行技能”“构建与签名技能”。
- 计划合成:并行安装依赖与拉取仓库;在“运行单测”设置检查点;“构建与签名”设置回滚(保留上一个稳定包)。
- 干跑校验:模拟安装流程与测试命令,检查网络/权限异常与磁盘空间。
- 执行监控:失败自动重试与降级策略(切换镜像源、跳过非关键测试);关键错误触发人工确认。
- 复盘沉淀:写入Memory,记录各镜像源的可用性、失败原因与修复脚本。
4.2 研发辅助场景
对于开发者而言,OpenClaw的Planning能力提供了强大的辅助:
- 代码审查:自动分析代码质量,提出改进建议
- 环境配置:根据项目需求自动配置开发环境
- 文档生成:基于代码自动生成技术文档和API说明
4.3 个人效率提升
在个人使用场景中,Planning能力帮助用户更好地管理时间和任务:
- 日程规划:根据用户习惯和优先级自动安排日程
- 任务提醒:智能判断任务紧急程度,适时提醒用户
- 习惯养成:分析用户行为模式,帮助建立良好的工作和生活习惯
5. Planning能力的未来发展趋势
5.1 多模态Planning
未来的Planning能力将不局限于文本交互:
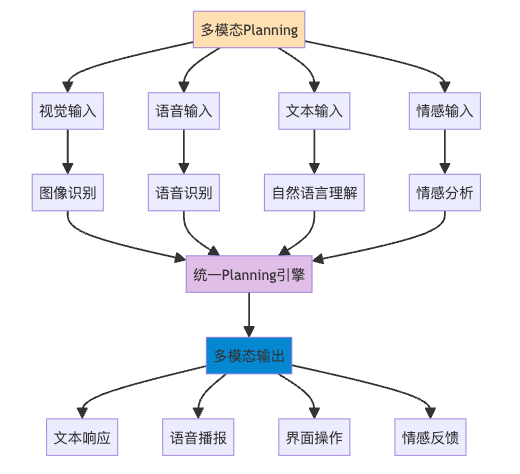
- 视觉理解:通过图像识别理解用户环境和需求
- 语音交互:支持自然语音指令,实现更直观的人机交互
- 情感感知:识别用户情绪状态,调整Planning策略
5.2 群体智能Planning
从单智能体向多智能体协作的演进:
- 蜂群思维:多个智能体形成群体智慧,共同解决复杂问题
- 分工协作:不同智能体承担不同角色,形成高效的协作网络
- 集体学习:整个智能体群体共享学习成果,加速进化
5.3 预测性Planning
从反应式Planning向预测性Planning的转变:
- 趋势预测:基于历史数据预测未来需求,提前做好准备
- 风险评估:在执行前评估各种可能的风险和后果
- 机会识别:主动发现用户可能感兴趣的机会和价值点
6. Planning能力面临的挑战与解决方案
6.1 安全性挑战
随着Planning能力的增强,安全性问题变得更加突出:
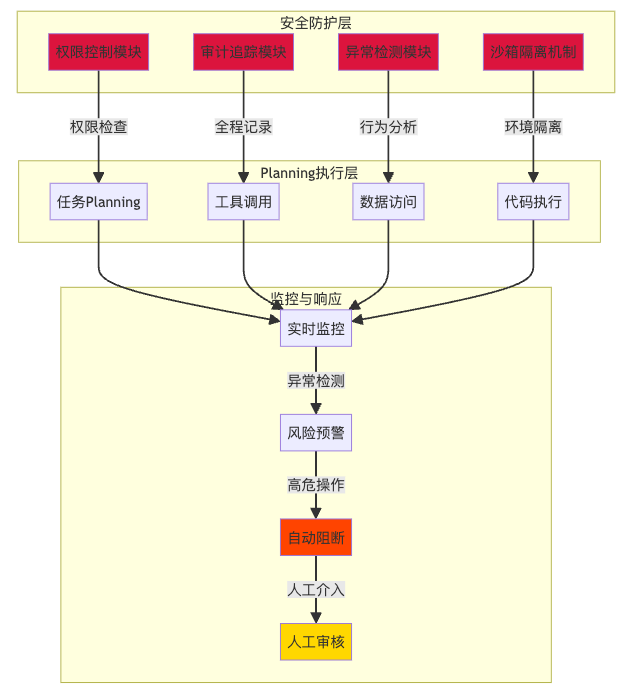
- 权限控制:实施最小权限原则,限制Planning执行范围
- 审计追踪:完整记录Planning决策过程,便于事后审查
- 异常检测:建立异常行为检测机制,及时发现潜在风险
6.2 可解释性挑战
复杂的Planning过程需要更好的可解释性:
- 决策透明:清晰展示Planning的每一步决策逻辑
- 结果验证:提供验证机制,让用户理解为什么做出特定决策
- 反馈机制:建立用户反馈循环,持续优化Planning算法
6.3 效率与质量的平衡
在追求Planning效率的同时保证执行质量:
- 质量评估:建立Planning结果的质量评估体系
- 动态调整:根据任务复杂度和重要性调整Planning深度
- 资源优化:合理分配计算资源,在效率和质量间找到最佳平衡点
7. 结语
OpenClaw的Planning能力代表了智能体技术的最前沿能力之一,它不仅仅是技术能力的展示,更是人机协作模式的一次变革。从被动响应到主动规划,从单一任务到复杂流程,从个体智能到群体智慧,Planning能力正在成为智能体核心竞争力的决定性因素。
随着技术的不断发展,我们可以预见,Planning能力将继续深化和扩展,最终将实现真正的自主智能体,能够在复杂多变的环境中自主决策、学习和进化。这不仅是技术的进步,更是人类文明发展的重要里程碑。
在这个智能体时代,掌握和运用好Planning能力,将成为个人、企业在人工智能竞争中取得优势的关键。OpenClaw的成功经验为我们指明了方向,也让我们对未来的智能体发展充满期待。