随着城市规模的不断地扩大和便民业务的发展,行车导航、共享汽车和物流派送等应用已经深入人们日常生活之中。,这些应用都不可避免地需要使用GPS、北斗等定位系统,进而产生了所记录的大量的轨迹数据。然而,普通民用GPS定位系统上传的位置数据会在多种因素影响下由于许多缘故发生与物体的实际地理位置不同的现象存在米级别的误差,产生了米级别的误差,存在米级别一般在10米以内的误差。此外,在数据传输、存储和耗电的条件限制下,导致,轨迹点采样频率不宜过高。又在数据传输和存储的条件限制下不能过高,因此,以上因素导致采集到的移动对象位置与其实际所在道路之间有一定距离偏差。因此,为了使接收到的位置数据可以真实反应映移动对象的运行轨迹,需要进行轨迹的各种轨迹的预处理工作,其中最重要的就是地图匹配是一项十分重要的工作。
一、地图匹配
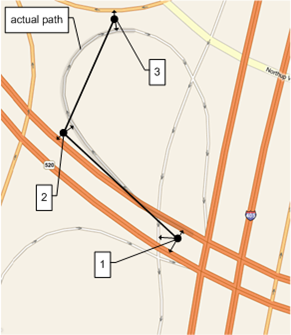
,顾名思义就是是将存在误差或和漂移的GPS观测点匹配至路网上的算法,它常用于还原观测点的其真实位置和移动物体的运动轨迹。如图1,地图匹配算法将采集到点1、2、3映射到路段上。地图匹配可分为离线和实时两种处理方式:离线方式接收过去一段时间观测到的批量轨迹数据,并计算输出全量轨迹的最优匹配结果。其优势在于准确度高。,然而,但它的相应地存在处理过程十分耗时的问题,因此,面对监测和追踪等需要实时返回计算结果的场景难免力有不逮;实时地图匹配则可以很好地弥补离线处理时延大的缺陷。目前,基于HMM的实时地图匹配算法[2]被广泛使用于在很多业务场景中,如公交车实时位置播报、快递员配送位置跟踪。以危化品运输车辆的监管为例,危化品运输车若偏离原报备路线,通过实时的地图匹配可以在第一时间获取其异常行为及最新位置,实现了对危化品车辆行驶路线的实时监测。[1] barefoot [1]是一个开源项目,它基于实时地图匹配算法提供了实时地图匹配服务。,本文接下来主要从算法思想和实现思路两方面介绍开源项目barefootbarefoot
[1] 中的实时地图匹配服务。
二、
Barefoot

图2、实时在线地图匹配演示图
Goh[2]提出的该算法基于隐马尔可夫模型(HMM),并采用可变滑动窗口进行回溯计算,实现了高精度低延时的实时地图匹配。
如下:。
1)
 ,找到距离
,找到距离 最近的位置,即为候选路网点。候选路网点通常为轨迹点
最近的位置,即为候选路网点。候选路网点通常为轨迹点 在对应路段的垂直投影点或路段的端点。
在对应路段的垂直投影点或路段的端点。
2)
获取到轨迹点

 ;再针对上一时刻的候选路网点集合
;再针对上一时刻的候选路网点集合 与本次集合
与本次集合 中的每一组候选点,以两个候选点之间最短路径的长度作为主要参数计算这两点之间的转移概率。
中的每一组候选点,以两个候选点之间最短路径的长度作为主要参数计算这两点之间的转移概率。
3)

 用以计算在已观测到轨迹点序列
用以计算在已观测到轨迹点序列
有可能符合真实情况的结果路网点 ;序列概率
;序列概率
是在已观测到轨迹点序列
 最可能的路径。
最可能的路径。
以使用历史轨迹点对应的候选路网点集合作为参数。因此,barefoot采用了可变滑动窗口来保存历史状态。
之可变,指的是窗口中可容纳的路网点集合数固定,而总路网点数量取决于每个路网点集中的点数,是可变的值。当接收到一个新轨迹点时,可变滑动窗口向前扩展一位,同时根据配置中的窗口上限参数来判断是否需要清除当前窗口中的历史路网点集。Barefoot 提供了状态更新TTL、路网点集合数量上限k和时间段上限 三个窗口配置参数用于配置路网点集合数。
三个窗口配置参数用于配置路网点集合数。
三、
Barefoot通过启动tracker server接收轨迹点,并发布计算结果。tTracker
server
通过空间查询获取候选路网点时,使用索引获取空间范围内的道路线id,并在道路线上通过插值计算出与轨迹点距离最近的候选路网点的坐标。

图4、更新候选点
)实现,在提供超时清理和新增入队功能的基础上,起到保证线程安全的作用。时间窗内的候选路网点集合通过使用链表相连实现,方便可以获取到每个路网点在上一状态中的关联点,以及本集合中最可能为真的目标路网点(如下图4中加粗的点)。本次候选路网点集合更新的同时,历史点集合中既不是目标点又与后继路网点无关联的点将被移除。
四、
Barefoot
的针对对轨迹点的实时地图匹配的毫秒级响应。经测试,针对单个轨迹点的地图匹配,Barefoot的计算耗时在50~200ms之间(详见下图5)。

Barefoot
的方式提供服务,。因此,当连接的客户端超出一定数量时,服务端的响应速度会受到影响;同时Barefoot没有开放Kafka、Storm等实时平台的接入方式,这使得其使用方式并不灵活。在地图匹配计算方面,由于受到轨迹数据信息量不足的限制,在计算转移概率时,对路径cost的计算不是以轨迹点速度为参数,而是采用固定参数进行模拟计算。导致这在一些情况下可能会对计算结果产生影响。除此以外,barefoot目前barefoot只支持OSM路网数据,不支持更加灵活的路网模型,且每次启动都将路网数据导入JVM中,这种方式限制了其扩展性和迁移性。诸如此类问题,都是在实现或者应用时可以改进的方向。例如,可以通过redis等分布式缓存技术优化路网构建的方法,使其更加适用于分布式场景;还可以针对特定路网数据的信息量对概率计算公式进行改进,通过这些方式使其更适用于特定的业务场景。
综上所述,bBarefoot优秀的设计思路,针对Barefoot的不足,正在实现一套集实时数据接入、实时地图匹配、实时地图展示等高可扩展的完整解决方案。在现有轨迹数据的精度的限制下,较好地平衡了实现难度和计算结果准确性,提供了比较好的实时地图匹配比较好的实现方案。
参考资料
[1] https://github.com/bmwcarit/barefoot
[2] C.Y. Goh, J. Dauwels, N. Mitrovic, M.T.
Asif, A. Oran, and P. Jaillet. Online map-matching based on Hidden Markov model
for real-time traffic sensing applications. In International
IEEE Conference on Intelligent Transportation Systems, 2012.
[3] https://just.urban-computing.cn/